

NEWS
2022/12/16
NEWS
産業用ロボットによるアーク溶接は、誰がロボットの起動ボタンを押しても、
早い生産時間で、安定して溶け込み・外観どちらも良質な溶接ビードを形成できることが最大のメリットかと思います。
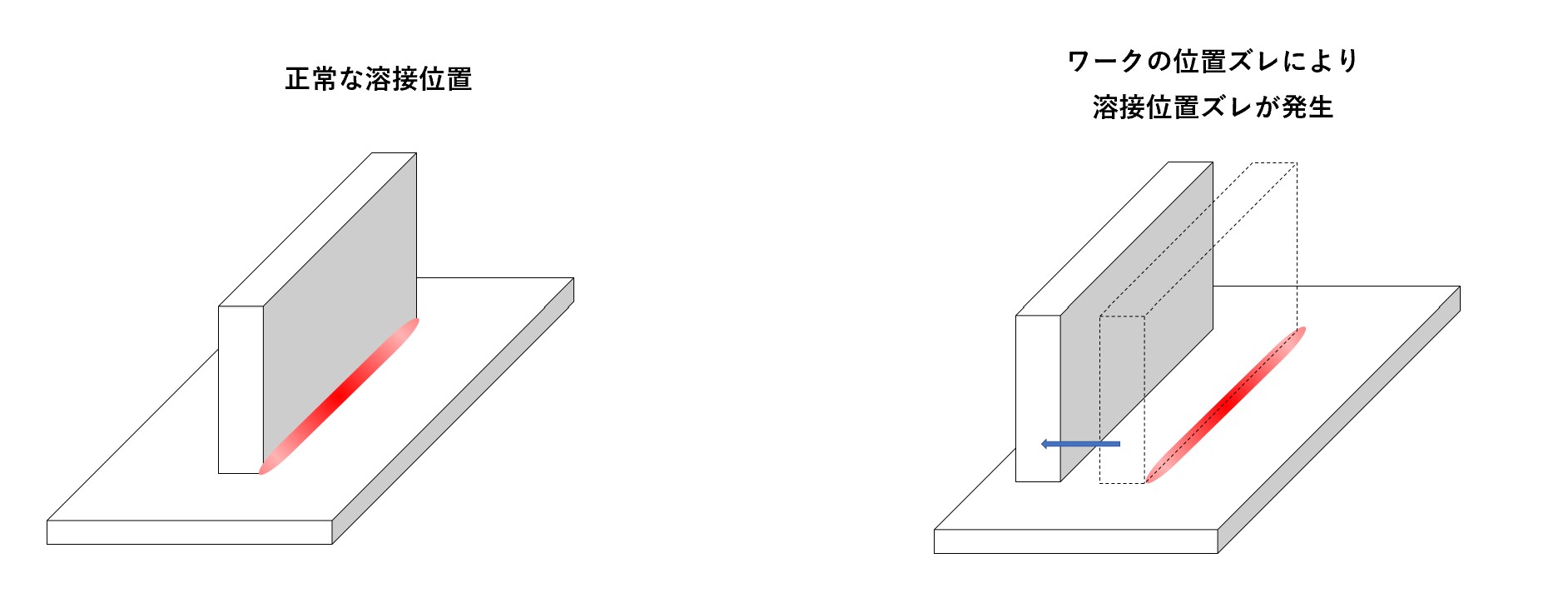
しかし産業用ロボットはティーチングによって教えた通りの動作しかできませんので、
溶接したいワークを毎回同じ位置にセットしなければ、溶接ビードがズレてしまいます。
その為、以下のようなお悩みを抱えていらっしゃるお客様は多いのではないでしょうか。
・治具の位置ズレが多く溶接位置がズレてしまう...
・ワークの精度があまりよくない為、都度ロボットの溶接位置を修正しなければならない...
・タッチセンサーという位置補正のオプションを検討したが、導入費用が高く難しい...
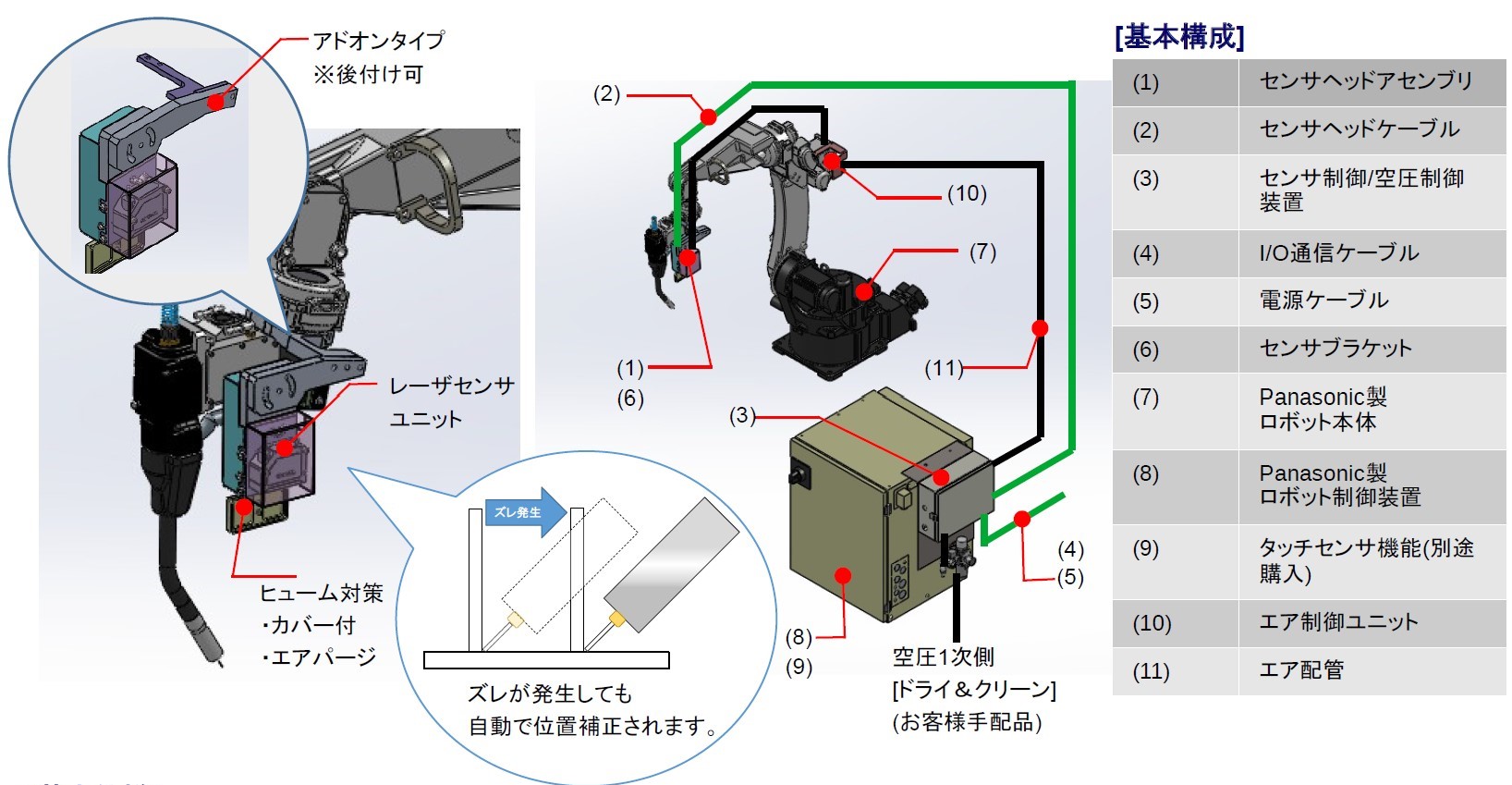
弊社ではこんなお悩みを解決する為、レーザータッチセンサーシステムを開発致しました。
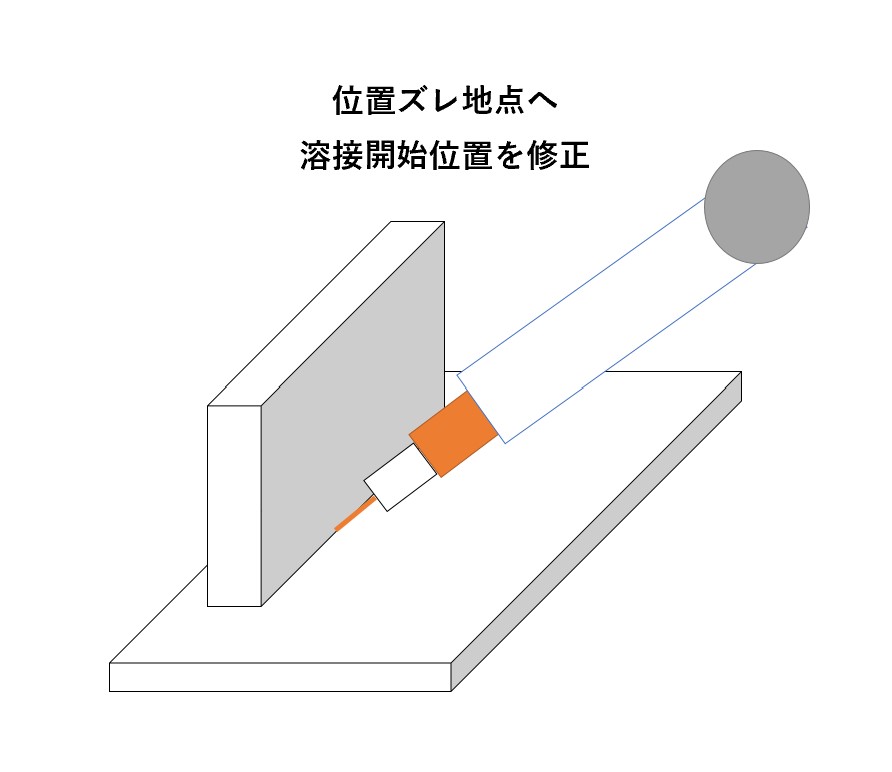
レーザー変位センサーを用いて溶接箇所の位置ズレを検知し、
ズレてしまった溶接位置から溶接開始できるよう位置修正する機能を持っております。
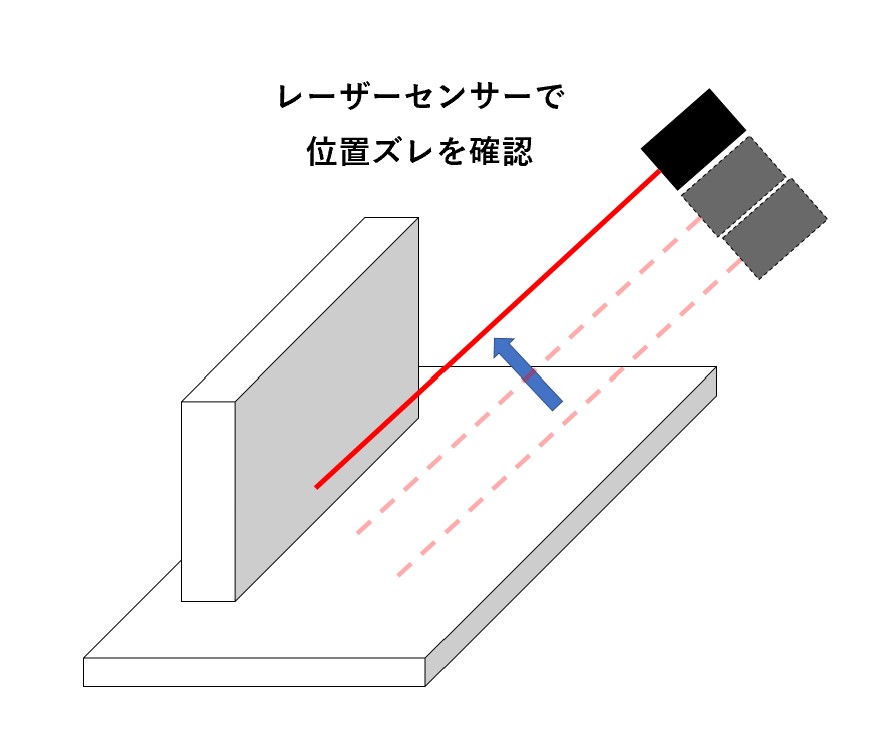
このレーザータッチセンサーシステムは下の写真のように、レーザーセンサーにてワークのズレを検知することで、
溶接の狙い位置がどれだけズレてしまったのかを確認することが可能です。
それをロボットにフィードバックし、受け取ったロボットはズレを検知した位置に動作を修正します。
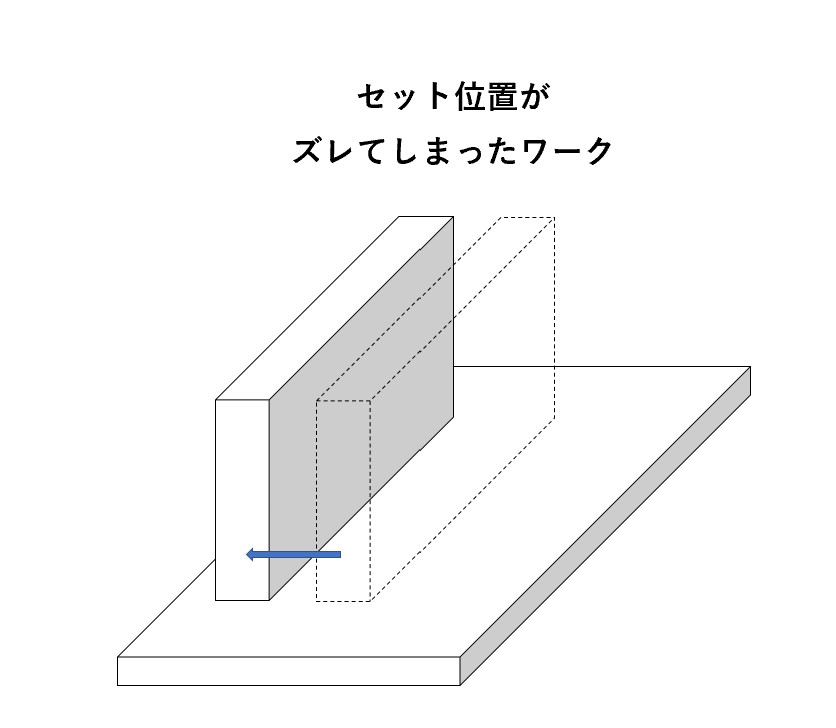
1.セット位置がズレたワーク
2.レーザータッチセンサーによる位置ズレ確認
3.位置ズレ地点へ溶接開始及び終了位置を修正
上記のようなお悩みを解決できる商品となっておりますので、
ご興味のある方はお問合せフォームよりお問合せください!
